KETI Remote Driving System
레이싱 휠 입력과 차량 CAN/UDP 파이프라인을 연결한 원격 주행 보조 시스템
개요
KETI 근무 후반부에 진행한 원격 주행 파이프라인 작업입니다. Logitech G923 입력을 Linux 장비에서 읽고, 차량 제어 메시지로 변환하며, 원격지에서 들어오는 제어 명령과 차량 피드백을 다루는 구조를 정리했습니다.
주요 작업
- Jetson Orin 환경에서 G923 스티어링 휠 인식과 드라이버 충돌 문제 대응
- Non-blocking joystick event 처리와 force feedback 제어 흐름 통합
- 조향/가감속 입력을 차량용 CAN payload로 인코딩하는 제어 파이프라인 구성
- UDP 기반 virtual CAN bridge로 원격 제어 입력을 차량 쪽 파이프라인에 연결
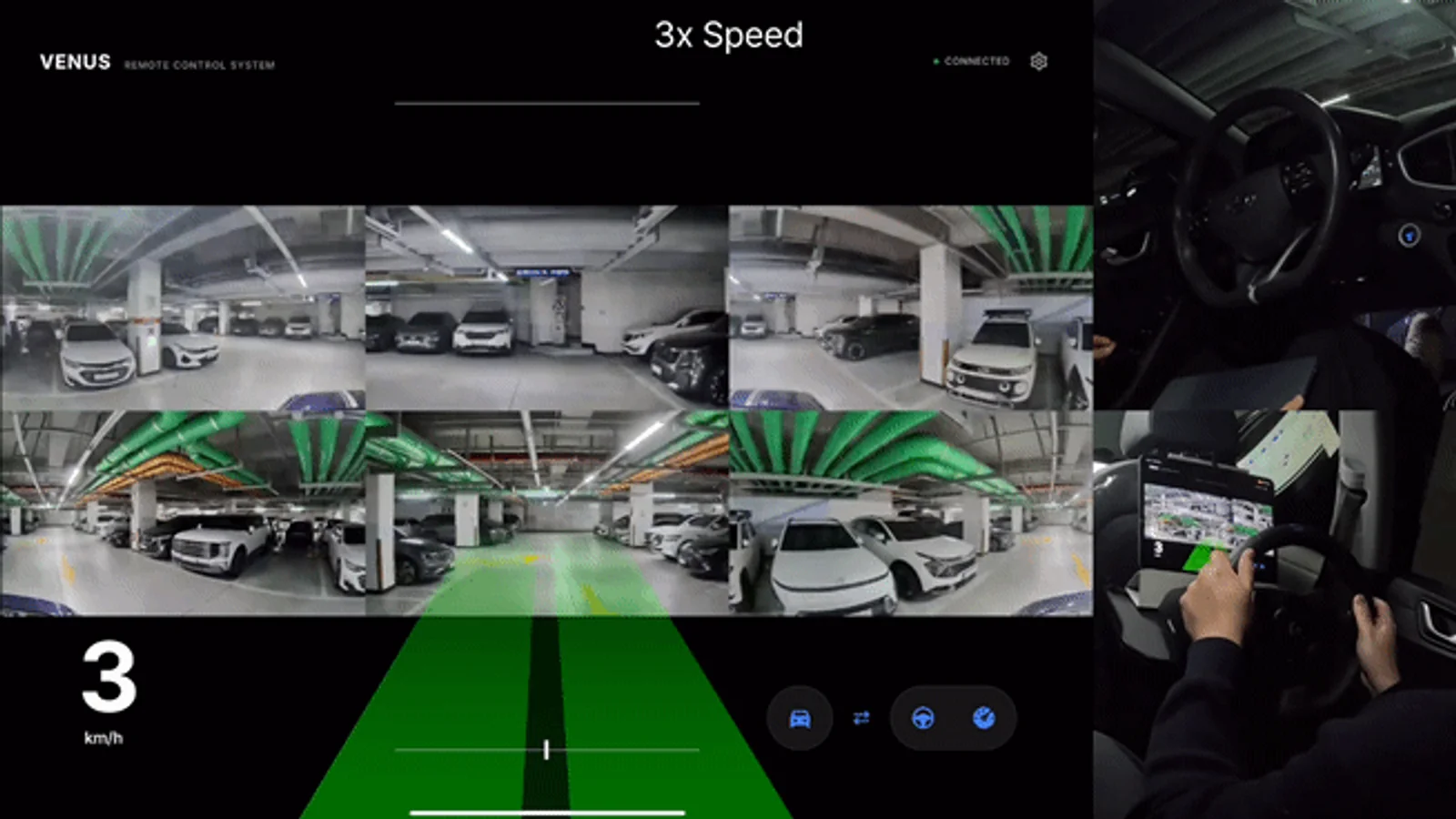
- Three.js/WebGL canvas로 카메라 화면 위 예상 주행 경로를 3D overlay로 표시
구현 메모
제어 명령 송신과 차량 피드백 수신을 분리하고, joystick event buffer에서는 최신 입력만 반영해 지연을 줄였습니다. 웹 원격 주행 화면에서는 다중 카메라 canvas와 HUD 위에 Three.js trajectory visualizer를 얹어 조향 입력에 따른 예상 경로를 실시간으로 확인할 수 있게 했습니다.